ALLPCB
ALLPCB


Overview
Industrial cameras are a core component of machine vision systems and are widely used in production-line inspection, intelligent transportation, robotics, scientific research, defense, and aerospace.
Key camera parameters include resolution, frame rate, pixel count, pixel size, and spectral response. The following explains concepts related to camera frame rate and its relationship with exposure time.
Frame Rate Basics
Frame rate is a measure of how many frames are displayed per second, typically expressed in frames per second (FPS) or hertz (Hz).
Because of human visual persistence, a frame rate above about 16 fps is perceived as continuous motion. In interactive and rendering contexts, 30 fps is generally acceptable, while 60 fps noticeably improves responsiveness and realism. Above roughly 75 fps, further improvements in perceived smoothness are difficult to notice.
Maximum Frame Rate and Line Rate
Maximum frame rate or line rate refers to the camera's image acquisition and transfer speed. For area-scan cameras this is measured in frames per second. For line-scan cameras it is measured in lines per second (Hz).
Exposure versus Sensor Readout
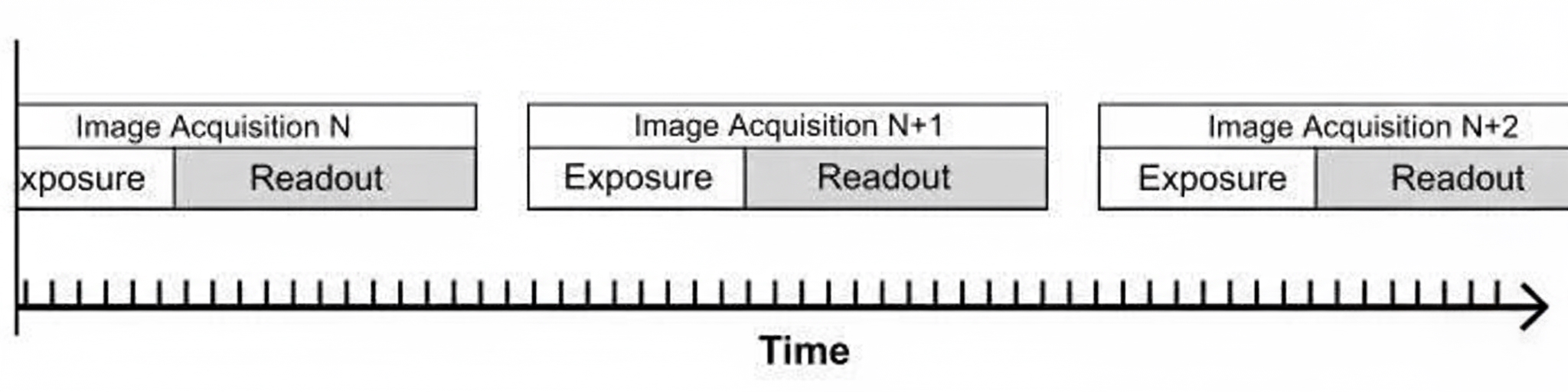
The image acquisition process on a camera consists of two distinct parts. The first part is exposure. After exposure completes, the second part is readout, which reads data from the sensor registers and transmits it out.
There are two common operating modes during image acquisition: non-overlapped exposure and overlapped exposure. In the non-overlapped mode, each image acquisition cycle completes both exposure and readout before the next exposure begins. The diagram below illustrates non-overlapped exposure.
Non-overlapped mode can be suitable for many situations but is not the most efficient. To increase frame rate, some cameras allow the readout of the previous frame to overlap with the exposure of the next frame. The overlapped exposure mode is shown below.

When readout and the next exposure overlap, the camera performs two operations in the same time interval. This allows more frames to be captured per unit time in the overlapped mode, increasing the effective frame rate.
Relationship Between Frame Period, Exposure, and Readout
The frame period relationships depend on the exposure mode:
- Overlapped mode: FramePeriod ≤ ExposureTime + ReadoutTime
- Non-overlapped mode: FramePeriod > ExposureTime + ReadoutTime
Timing Example: STC-A202A
Consider the STC-A202A as an example.
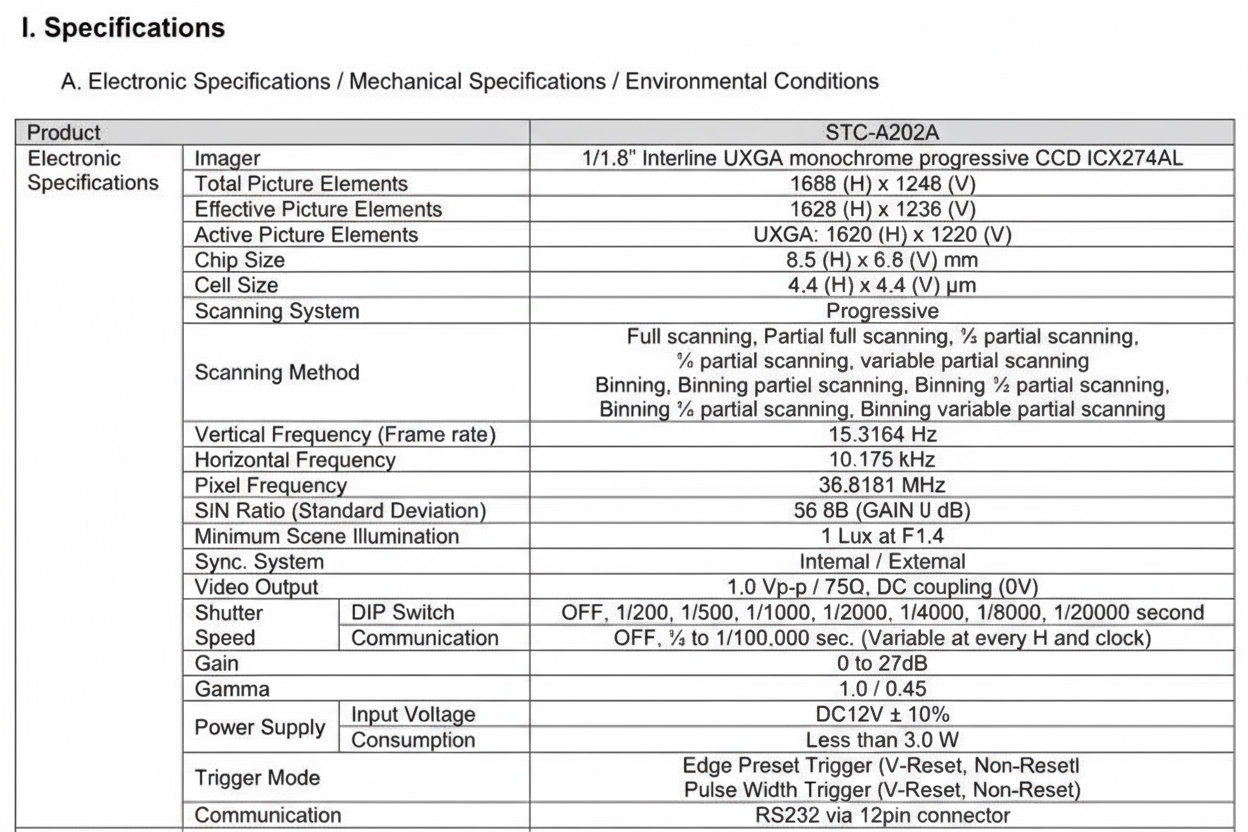
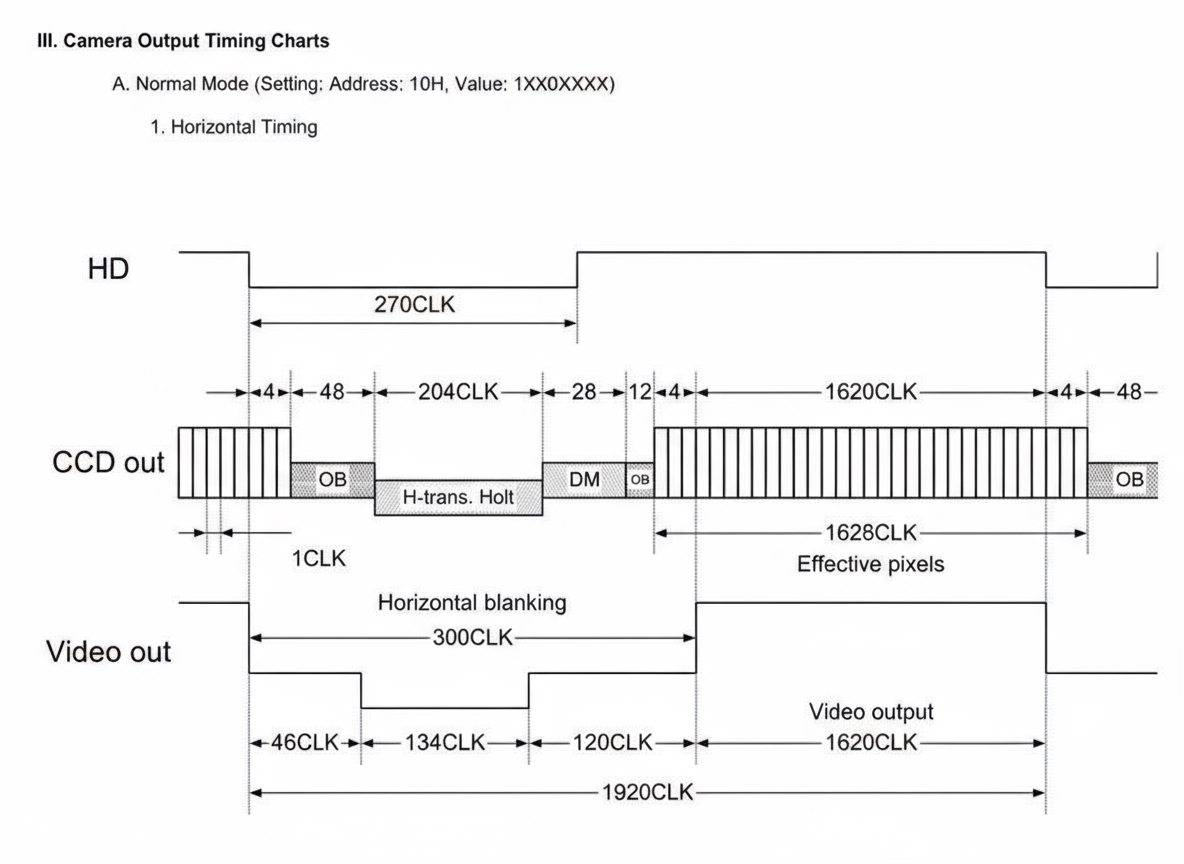
The spec lists a pixel frequency of 36.8181 MHz, so one clock period is approximately 1/36.8181 MHz = 27.3836 ns. The camera timing chart provides a horizontal timing value where 1 CLK ≈ 27.1605 ns. Scanning one horizontal line requires 1920 CLK, so 1H = 27.1605 ns × 1920 = 52.14816 μs.
From the vertical timing chart, 1H = 52.1482 μs, consistent with the horizontal calculation. One frame requires scanning 1252 H, of which effective pixel readout is 1220 H. The effective pixel readout time per frame is 1220 × 52.1482 μs = 63.620804 ms. A full VD period is 1252 × 52.1482 μs = 67.7935464 ms.
Using the earlier relationship, FramePeriod = ExposureTime + ReadoutTime in non-overlapped mode. The STC-A202A's nominal frame rate is 15 fps, so FramePeriod = 1/15 = 66.7 ms.
Therefore, in non-overlapped exposure mode: ExposureTime = FramePeriod - ReadoutTime = 66.7 ms - 63.6 ms = 3.1 ms. If exposure time exceeds 3.1 ms under this mode, the actual frame rate will fall below the nominal 15 fps.
Practical Example
For example, if a camera has a readout time A = 66.7 ms and an exposure time B = 5 ms, the frame time C = A + B = 71.7 ms. The resulting frame rate = 1000 ms / 71.7 ms ≈ 13.94 fps.
Note: If a camera's nominal frame rate is 15 fps, this implies a readout time of approximately 1000 ms / 15 = 66.7 ms under non-overlapped timing assumptions.